)
)
)
)
)
)
)
)
)
)
)
)
)
)
)
)
)
)
)
)
)
)
)
)
)
压电叠堆功率放大器在直升机机身振动研究中的应用
实验名称:直升机机身的多谐波多输入多输出振动主动控制试验研究
实验原理:首先采用一个由Z-11直升机地板模型缩比而来并且与Z-11直升机动力学相似的框架模型作为研究对象,将压电叠层作动器整合到受控结构中,通过数字信号处理器作为试验系统的控制器,整合搭建了压电叠层作动器驱动的直升机机身多谐波多输入多输出振动主动控制试验系统,并且离线测量了搭建好的试验系统的控制通道传递函数。
试验系统中,采用一个框架试验模型模拟Z-11直升机座舱用来进行振动主动控制试验,其材料选用45号钢,总质量为15.7kg。加工完成的框架试验模型如图a所示。

图a直升机地板框架实验模型
压电叠层作动器通过两端的内螺纹与外部结构相连,压电叠层作动器不能承受拉力和弯矩,否则压电薄片之间的连接会发生脆性断裂从而导致压电叠层作动器损坏失效。因此在实际使用中,为了避免拉力,安装压电叠层作动器时会在两端施加一定的预紧力,并且避免使用负电压驱动压电叠层作动器;为了避免压电叠层作动器承弯,在安装压电叠层作动器时将一个弹性较与作动器并联安装,安装形式如图b所示。

图b压电叠层作动器安装形式

图c实验系统原理框图
测试设备:信号发生器、ATA-P0102功率放大器、压电叠堆、DSP、信号调理模块、计算机
实验过程:DSP内部的信号发生器生成数字激励信号通过D/A转换为模拟信号,然后通过低通滤波和功率放大器放大后输入到电磁激振器对框架结构产生激励响应,模拟旋翼在直升机座舱地板产生的振动响应。加速度传感器采集待减振点处的加速度响应,并转化为相应的电信号,再由A/D采样得到数字信号。采集到的数字信号代入控制算法用来修正得到压电叠层作动器的驱动信号,驱动信号通过D/A转换后经过低通滤波器和功率放大器输入到压电叠层作动器,驱动结构产生作动响应来抵消激励响应。同时,通过串口将误差响应信号与作动器驱动信号实时发送给计算机进行存储。
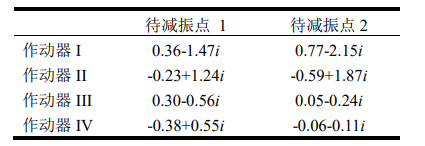
多谐波多输入多输出前馈自适应控制算法需要准确的控制通道的传递函数来保证控制算法的收敛。本实验通过识别离线测量的方法,采集并计算得到了直升机机身振动主动控制试验系统的控制通道传递函数,测量试验的原理图如图c所示。数字信号发生器产生正弦激励信号,经过D/A转换和低通滤波后,再经过功率放大驱动压电叠层作动器对框架施加作动力。作动力在待减振点处产生作动响应,并由安装在待减振点的加速度传感器测量。测量的加速度信号经过低通滤波和A/D转换后得到数字信号,与激励信号一起通过串口实时传送到计算机上。计算机对数据进行抓包和解码处理后,计算加速度信号和激励信号的幅值比和相位差,即可得到控制通道的传递函数。试验中,采样频率设为f=975Hz,激励信号频率参考Z-11型直升机,分别测量了19.5Hz和39Hz的控制通道传递函数,结果如表1和表2所示。需要指出的是,控制通道的传递函数除了作动器和试验框架模型的动态特性,还包括了功率放大器放大倍数、传感器的灵敏度以及A/D转换和D/A转换的精度。
表119.5Hz控制通道传递函数
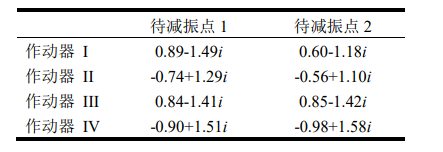
表239Hz控制通道传递函数
实验结果:根据Z-11直升机机身上实测的振动响应信号,单谐波激励的频率选取为第一阶桨叶通过频率ω1=NbΩ=19.5Hz。Z-11直升机机身振动的一阶通过频率加速度响应为0.95m/s,为了使两个待减振点在无控制时的振动加速度水平与Z-11直升机相同,设置激励信号的幅值为Xe(t)=1.465×sin(2πω1t)。激励信号经过放大后驱动电磁激振器对框架试验模型的激励点1进行激励,激振力沿Z方向,激振点位于框架结构的中性线上,此时框架试验模型仅垂向弯曲模态的振动被激发。试验研究中,采样频率为fs=975Hz,控制算法的谐波系数识别收敛系数取Ʊ1=0.03,归一化LMS算法的收敛系数取Ʊ0=0.001。别的谐波系数向量初始值均为0。两个减振点的垂向加速度响应如图d和图e所示,四个压电叠层作动器的驱动电压如图f到图i所示。可以看出,振动主动控制系统开始从10秒启动后,两个待减振点的振动随之衰减,并在10秒内逐渐收敛到稳定状态。稳定控制状态下,两个减振点的振动响应分别降低了97%和98%。

图d单谐波对称激励试验待减振点1的垂向加速度响应

图e单谐波对称激励试验待减振点2的垂向加速度响应

图f单谐波对称激励试验压电叠堆作动器1的驱动电压

图g单谐波对称激励试验压电叠堆作动器2的驱动电压

图h单谐波对称激励试验压电叠堆作动器3的驱动电压

图i单谐波对称激励试验压电叠堆作动器3的驱动电压
本文实验素材由西安JN江南sports电子整理发布,如想了解更多实验方案,请持续关注JN江南sports官网www.aigtek.com。Aigtek是国内专业从事测量仪器研发、生产和销售的高科技企业,一直专注于高压放大器、电压放大器、功率放大模块、高精度电流源等测试仪器产品的研发与制造。